

同步解调技术的讨论
低频测量示例
在某些应用中,直接测量具有低频输出的传感器(不应用同步解调)。例如,驻极体麦克风是一种直接测量的特殊类型的可变电容。驻极体麦克风的电容随气压变化(声波)而变化。
电容器结构中使用了一种称为驻极体的类聚四氟乙烯材料,其表面附着有固定电荷。由于电容器上的电荷是固定的,气压变化引起的电容值的变化会导致电容器两端的电压发生相应的变化(对于电容器,我们有Q=CV)。
如图 1 所示,驻极体麦克风通常具有充当缓冲器的内部 JFET。
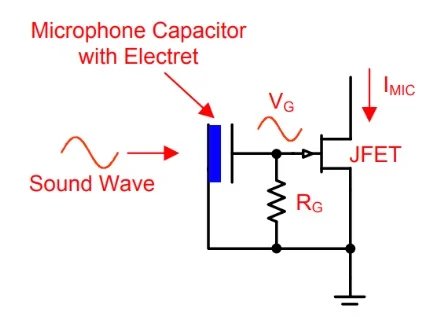
图 1.图片由德州仪器 (TI)提供。
在此特定应用中,传感器(麦克风)产生的信号直接施加到电路的放大元件。这种测量电容式传感器的方法有时称为“直接直流”方法,因为直接测量电容器上的低频信号。
测量低频信号时出现的主要问题之一是闪烁噪声。
闪烁噪声
闪烁噪声的平均功率与工作频率成反比(这就是闪烁噪声也称为 1/f 噪声的原因)。因此,信号频率越低,我们必须处理的噪声功率就越大。图 2 显示了精密运算放大器ADA4622-2的电压噪声频谱密度。
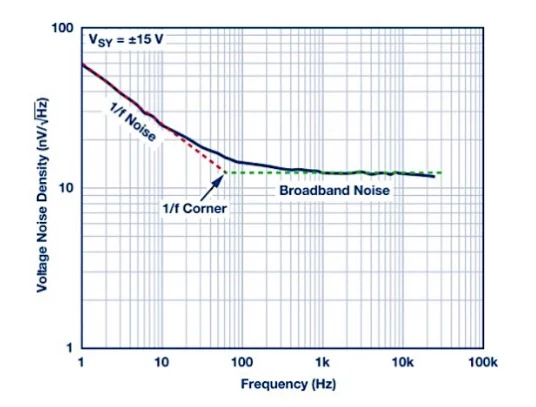
图 2.图片由Analog Devices提供
在大约 100 Hz 以上,噪声功率几乎均匀地分布在不同频率之间。噪声分布的该区域对应于器件的热噪声。然而,当频率低于 100 Hz 时,噪声平均功率会因闪烁噪声而增加。
用直线近似噪声分布的两个不同区域,我们可以找到一个交点,称为 1/f 噪声角频率(如图 2 所示)。转角频率使我们能够确定给定频率下设备的主要噪声类型(闪烁或热噪声)。
低于 1/f 转角频率时,传感器产生的小信号可能完全被噪声淹没。如果我们能够以某种方式将传感器输出信号的频率提高到转角频率以上,我们就可以进行更准确的测量。这是同步解调技术背后的基本思想。
图 3 显示了如何在较高频率下进行测量,从而从器件闪烁噪声中提取出所需的信号。

图3
对于图 1 所示的“直接 DC”测量来说,闪烁噪声可能不是一个严重的问题,因为语音信号在非常低的频率(低于约 20 Hz)下显示的功率可以忽略不计。此外,我们也许能够定制内部缓冲晶体管以降低其 1/f 转角频率。
然而,在某些应用中,传感器的输出信号频率要低得多(几乎是直流),我们需要更的测量。在这种情况下,电子元件的闪烁噪声可以完全掩盖传感器产生的信号,我们需要同步解调等技术来规避闪烁噪声问题。
传感器的交流励磁
图 4 说明了使用交流信号来测量电容式传感器。在此图中,可变电容 C sense模拟了我们的电容式传感器。输入电压源施加频率在 1 kHz-1 MHz 范围内的正弦波。根据 C sense与 C 2的比率,运算放大器的输入端会出现电压信号。在这种情况下,运算放大器的输入信号可以选择为足够大于电路的 1/f 转角频率。这与“直接直流”方法相反,在“直接直流”方法中,测量的信号可以处于非常低的频率。
由于所需信号远离 1/f 转角频率(如图 5 所示),因此闪烁噪声不是限制因素,我们可以检测到更小的信号。
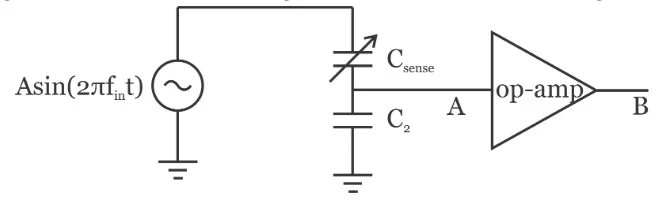
图4
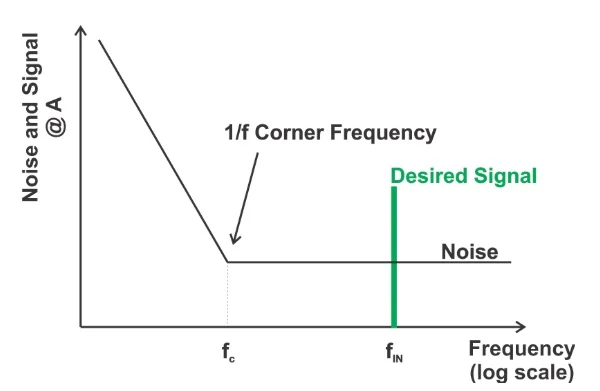
图5
在运算放大器的输出端,我们有一个放大的信号,可用于确定可变电容的值;然而,我们需要一个带通滤波器(BPF)来抑制噪声成分并仅保留所需的信号。如图 6 所示。
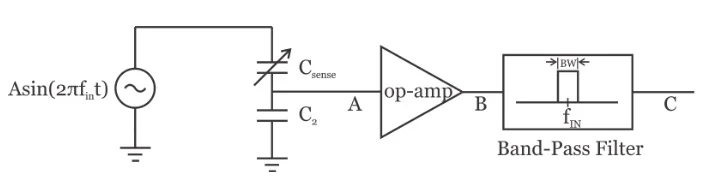
图6
请注意,BPF 的中心频率与输入频率相同。假设带通滤波器是理想的,我们将获得所需的信号以及落在带通滤波器的通带中的热噪声(下图 7)。
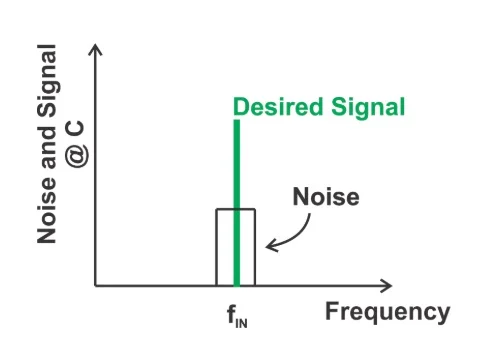
图7
使用 BPF 的限制
在图 6 中,我们需要一个高 Q 带通滤波器来充分抑制噪声并保留所需信号。非常高 Q 值的滤波器可以让我们抑制大部分噪声。然而,存在两个主要问题:首先,实现高 Q 连续时间带通滤波器可能具有挑战性,尤其是在高频下。事实上,随着滤波器中心频率的增加,实现给定的 Q 因子变得越来越困难。这是因为在高频(大约几百 MHz)下,运算放大器的放大能力有限并且表现出不理想的相位响应。您可能会说图 6 中滤波器的中心频率在 1 kHz-1 MHz 范围内,这并不是真正的高频滤波器。嗯,你是对的,我们可以在这个频率范围内使用高 Q 值滤波器。然而,随着我们的频率越来越高,我们必须消耗更多的能量。换句话说,对于给定的 Q 因子,我们期望较低频率的滤波器表现出较低的功耗。因此,如果运算放大器之后的滤波能够以较低的频率执行,则可以提高功率效率。
图 6 所示概念的第二个问题是调整带通滤波器的中心频率。请注意,模拟连续时间滤波器的中心频率取决于电阻器、电容器和跨导器的值。这些参数的可能会有很大差异。因此,滤波器的中心频率可能不完全位于 f IN。由于滤波器的通带很窄,因此由于滤波器中心频率的变化,所需信号可能很容易落在滤波器通带之外。使用高 Q BPF 的第二个问题可能比上一段中讨论的功率效率问题更具挑战性。有趣的是,如果应用需要高 Q 连续时间带通滤波器,我们必须采用一种机制来调整滤波器中心频率。例如,一些集成带通滤波器应用采用概念上类似于锁相环的反馈环路来调谐滤波器中心频率。然而,这样的系统对于读取传感器来说似乎过于复杂且耗电。在下一节中,我们将看到,巧妙的调整可以使用低通滤波器而不是 BPF 来实现所需的滤波操作。通过这种方式,我们可以获得不需要任何频率调谐电路的低功耗解决方案。
同步解调
同步解调的概念如图 8 所示。在该图中,乘法器放置在运算放大器之后。

图8
假设运放输出端的输出信号为\(v_B(t)=Bsin(2\pi f_{in}t+\phi)\)。该信号乘以输入信号 \(Asin(2\pi f_{in}t)\)得出:
\[v_C(t)=Asin(2\pi f_{in}t) \times Bsin(2\pi f_{in}t+ \phi)= \frac {1}{2}ABcos(\phi)-\frac {1}{2}ABcos(4\pi f_{in}t+\phi)\]
项是直流,但第二项是输入频率的两倍。因此,窄低通滤波器可以消除第二项,我们有:
\[v_D(t)= \frac {1}{2}ABcos(\phi)\]
如果我们假设运算放大器没有引入任何延迟,即 \( \phi = 0 \),我们得到 \(v_D(t)=\frac {1}{2}AB \)。可以看到,低通滤波器的输出与节点 A 处的信号幅度成正比,可用于测量 \(C_{sense} \) 的值。上述方法具有三个优点:
传感器输出的频率可以选择为比 1/f 转角频率足够高。
滤波器以尽可能低的频率运行,并且消耗尽可能小的功率。
该滤波器不需要频率调谐电路。


